全国服务咨询热线:
13675884706
13675884706

产品分类
Product Category相关文章
Related Articles详细介绍
| 品牌 | 其他品牌 | 应用领域 | 电子 |
|---|
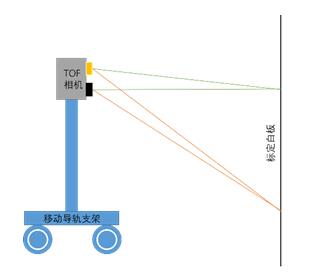
对于传感器如果测量值与实际值之间存在固定的偏差时,通常的做法就是重新标定,在测量值和实际值之间建立映射关系。对TOF相机而言可以把相机固定在导轨上,对着一堵白墙测距,把每一个像素点的测量值和白墙成像区域与相机之间的距离建立起对应关系,再根据这种对应关系,在测量值上进行修正就可以获得较为准确的距离值。
如果这还不能解决,看看相机安装是否有问题。
TOF相机是一种主动测距方式,测量的准度受很多因素干扰,其中安装不合适的话有可能会引入多路径等问题,导致测距准度失真。
移动机器人在行走过程中,通常需要对行驶路径上静态或者动态的物体或者凹坑进行甄别,然后停止等待障碍物人为移除,即停障,或者按照一定的算法实时更新路径,绕过障碍物终到达目标点,即绕障。
移动机器人要想实现安全避障第壹步便是对环境进行感知。就绕障来说,移动机器人需要通过传感器实时获取自身周围障碍物信息,包括尺寸、形状和位置等信息。在避障方式上,各家的避障传感器种类繁多,但无外乎单点红外传感器,单线激光雷达、超声波传感器、碰撞条以及视觉传感器。
蓝芯科技是以计算机视觉为核心技术,利用人工智能技术结合深度视觉感知传感器让机器“慧”做事。公司出品的移动机器人采用自研的Eagle系列视觉避障传感器结合多种传感器进行自主避障,优势在于可以根据不同的应用需求定制化避障传感器性能参数。

叉车和料箱车避障:
其采用Eagle系列LXPS-Eagle-I320-U/LXPS-Eagle-I320-E传感器进行避障,传感器详细规格参数如下:
测距范围: 0.5-6m(远测距12m)
测距精度: 1% @ 2m 70%反射率
视场角: 72°X 55°;
分辨率: 320*240
帧率: 20fps
数据接口: USB3.0/Ethernet
相机尺寸: 43mm×78mm×38mm
运行环境: -10℃-70℃
阳光抑制: 50klux
产品咨询
电话
微信扫一扫

 当前位置:
当前位置:
